
 Tutorials Tutorials | (back to the list of tutorials) |
 Accessing X, Y and Z of Vector
Accessing X, Y and Z of Vector![]()
![]()
![]()
![]()
import processing.opengl.*;
import igeo.*;
size( 480, 360, IG.GL );
IVec vec = new IVec(20, 10, 0);
double xvalue = vec.x();
IG.p("x value is "+xvalue);
double yvalue = vec.y();
IG.p("y value is "+yvalue);
double zvalue = vec.z();
IG.p("z value is "+zvalue);
Duplicate Vectors![]()
![]()
![]()
![]()
import processing.opengl.*;
import igeo.*;
size( 480, 360, IG.GL );
IVec v1 = new IVec(0, 10, 20);
IVec v2 = v1.dup();
IVec v3 = new IVec(v1);
IG.p("vector1 = "+v1);
IG.p("vector2 = "+v2);
IG.p("vector3 = "+v3);
Add/Subtract Vectors![]()
![]()
![]()
![]()
import processing.opengl.*;
import igeo.*;
size( 480, 360, IG.GL );
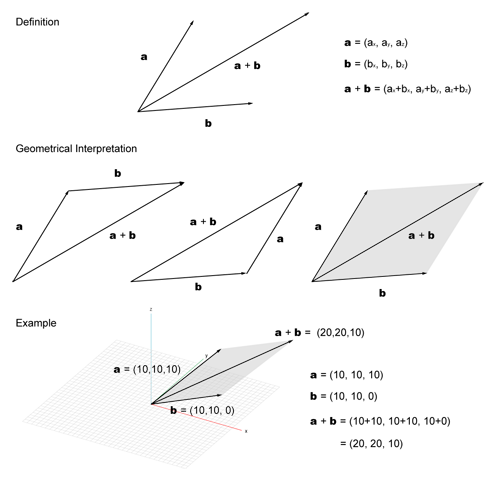
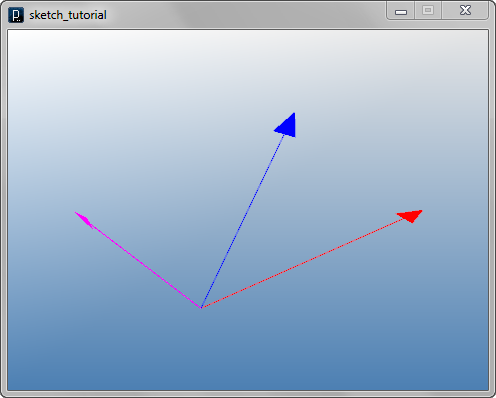
IVec v1 = new IVec(20, 10, 0);
IVec v2 = new IVec(10, 10, 10);
IVec v3 = v2.dup();
v3.add(v1);
// visualizing vectors as arrows
v1.show().clr(1.,0,0); // red
v2.show().clr(0,0,1.); // blue
v3.show().clr(1.,0,1.); // magenta
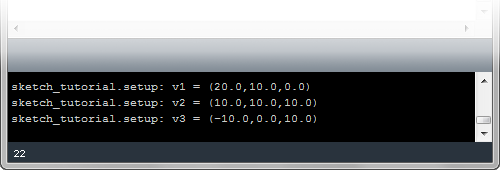
IG.p("v1 = "+v1);
IG.p("v2 = "+v2);
IG.p("v3 = "+v3);
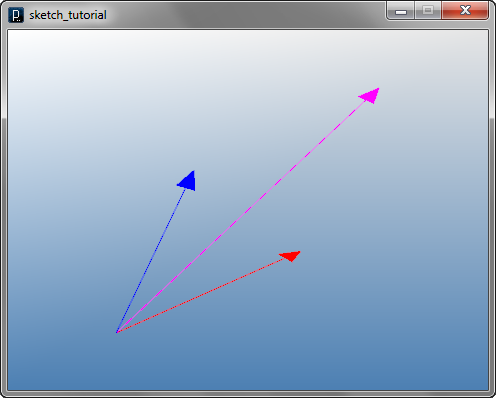
Mathematical meaning of vector addition is like the following diagram.
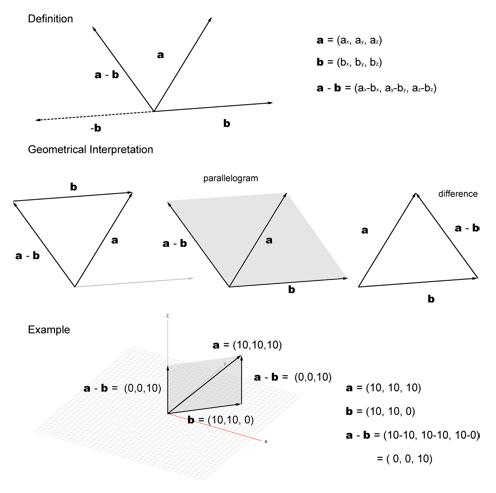
Subtracting vectors is done in the same way with adding.
Please use sub() method.
![]()
![]()
![]()
![]()
import processing.opengl.*;
import igeo.*;
size( 480, 360, IG.GL );
IVec v1 = new IVec(20, 10, 0);
IVec v2 = new IVec(10, 10, 10);
IVec v3 = v2.dup();
v3.sub(v1);
// visualizing vectors as arrows
v1.show().clr(1.,0,0); // red
v2.show().clr(0,0,1.); // blue
v3.show().clr(1.,0,1.); // magenta
IG.p("v1 = "+v1);
IG.p("v2 = "+v2);
IG.p("v3 = "+v3);
Vector subtraction can be diagrammed like the below.
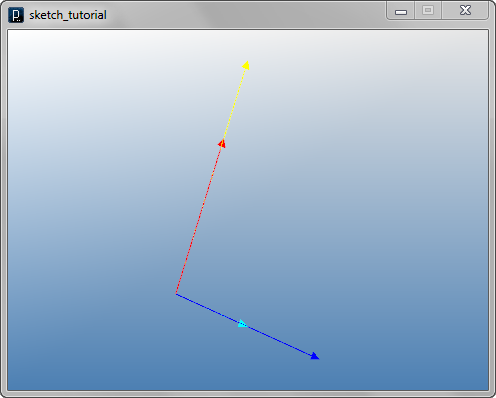
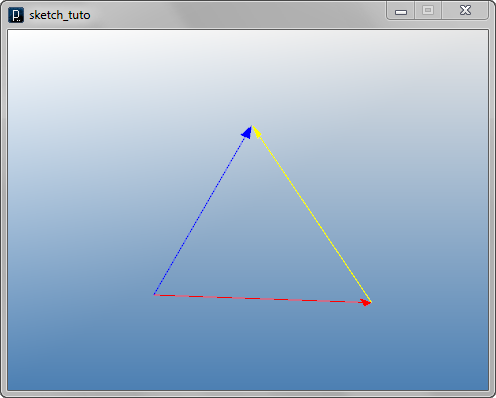
Multiply/Divide Vectors![]()
![]()
![]()
![]()
import processing.opengl.*;
import igeo.*;
size( 480, 360, IG.GL );
IVec v1 = new IVec(10, 20, 30);
IVec v2 = v1.dup();
v2.mul(1.5);
IVec v3 = new IVec(30, -10, -10);
IVec v4 = v3.dup();
v4.div(2.0);
v1.show().clr(1.,0,0); // red
v2.show().clr(1.,1.,0); // yellow
v3.show().clr(0,0,1.); // blue
v4.show().clr(0,1.,1.); // cyan
IG.p("v1 = " + v1);
IG.p("v2 = " + v2);
IG.p("v3 = " + v3);
IG.p("v4 = " + v4);
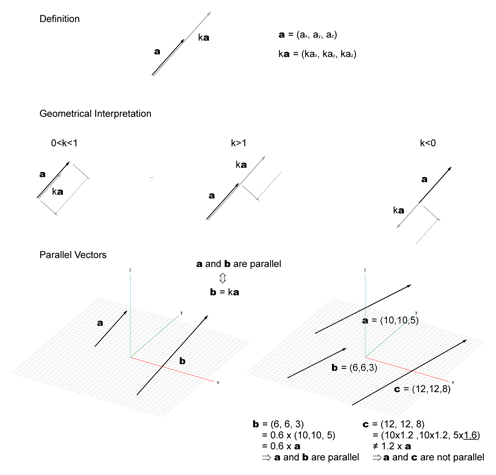
Vector multiplication can be described like the below. Vector division can be seen as multiplication of inverted scalar number.
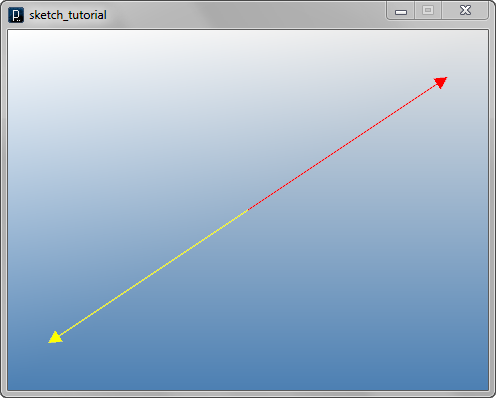
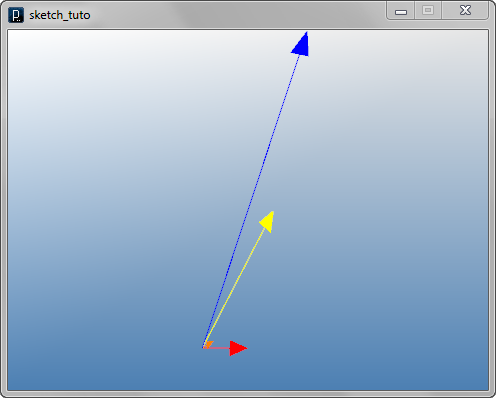
Flip Vectors![]()
![]()
![]()
![]()
import processing.opengl.*;
import igeo.*;
size( 480, 360, IG.GL );
IVec v1 = new IVec(30, 20, 10);
IVec v2 = v1.dup();
v2.flip();
v1.show().clr(1.,0,0); // red
v2.show().clr(1.,1.,0); // yellow
IG.p("v1 = " + v1);
IG.p("v2 = " + v2);
Length, Distance and Unitization![]()
![]()
![]()
![]()
import processing.opengl.*;
import igeo.*;
size( 480, 360, IG.GL );
IVec v1 = new IVec(10,10,0);
double length = v1.len();
IVec v2 = new IVec(10,-10,0);
double distance = v1.dist(v2);
IVec v3 = v1.dup();
v3.unit();
IVec v4 = v1.dup();
v4.len(10);
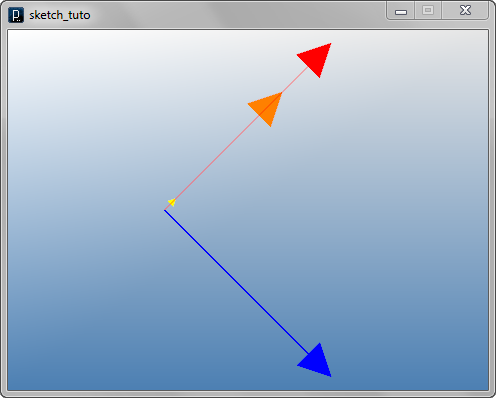
v1.show().clr(1.,0,0); //red
v2.show().clr(0,0,1.); //blue
v3.show().clr(1.,1.,0).size(0.5); //yellow w head size 0.5
v4.show().clr(1.,.5,0); //orange
IG.p("length of v1 = " + length);
IG.p("distance between v1 and v2 = " + distance);
IG.p("v3 = " + v3);
IG.p("v4 = " + v4);
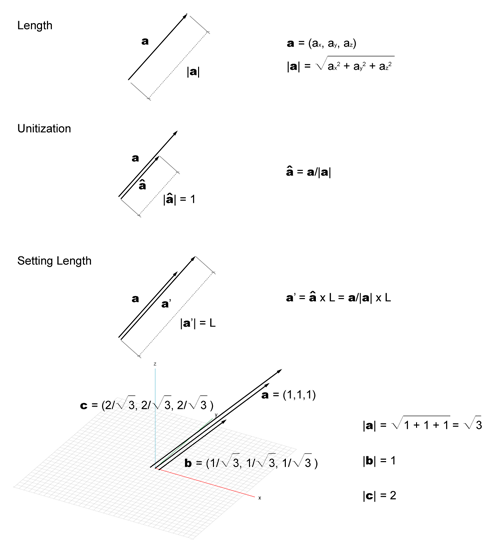
Those operations can also be described as the following.
Dot Product
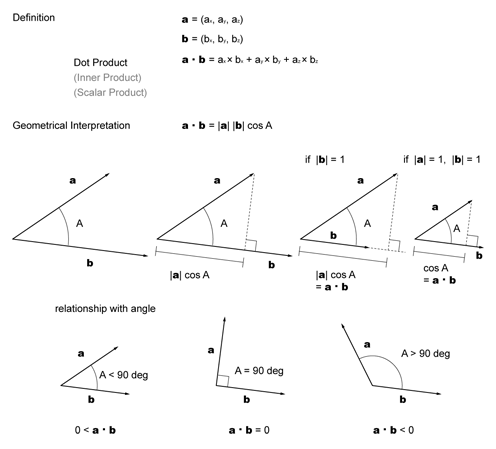
In IVec class, you can use dot() method with another vector put in the argument. Please note that dot() method is returning a value in double, not a vector.
![]()
![]()
![]()
![]()
import processing.opengl.*;
import igeo.*;
size( 480, 360, IG.GL );
IVec v1 = new IVec(10,20,30);
IVec v2 = new IVec(10,10,10);
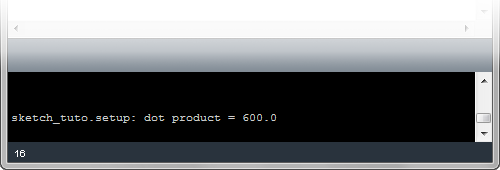
double dotValue = v1.dot(v2);
IG.p("dot product = "+dotValue);
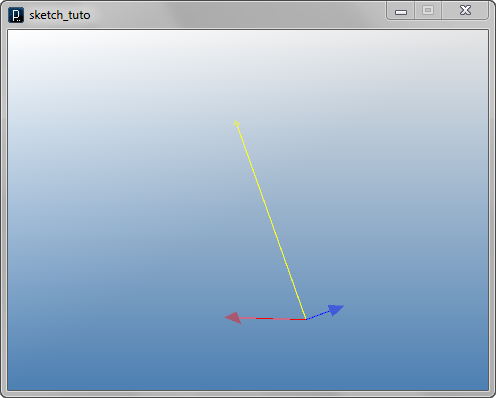
Cross Product
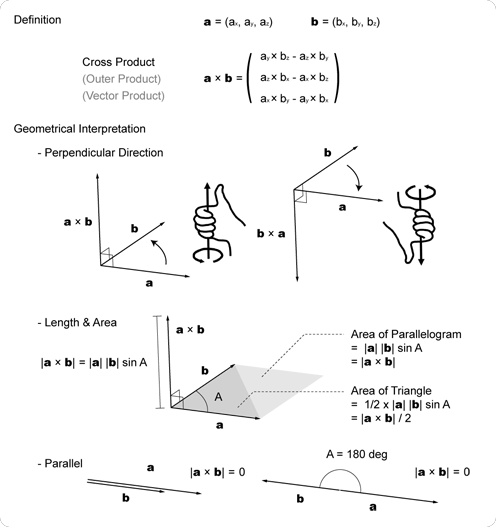
In iGeo, you can calculate a cross product by cross() with another vector put in the argument. Please note that cross() generates a new vector, without changing the contents of itself. which is different behavior from add/sub/mul/div where the result of the method is contained inside the one of input vectors changing its contents.
![]()
![]()
![]()
![]()
import processing.opengl.*; import igeo.*; size( 480, 360, IG.GL ); IVec v1 = new IVec(10, 20, 30); IVec v2 = new IVec(5, 20, 10); IVec v3 = v1.cross(v2); v1.show().clr(1.,0,0); v2.show().clr(0,0,1.); v3.show().clr(1.,1.,0);
Angle and Rotation![]()
![]()
![]()
![]()
import processing.opengl.*;
import igeo.*;
size( 480, 360, IG.GL );
IVec v1 = new IVec(0, 10, 10);
IVec v2 = new IVec(0, -5, 5);
IVec axisVec = new IVec(1, 0, 0);
double angle1 = v1.angle(v2);
double angle2 = v1.angle(v2, axisVec);
double angle3 = v2.angle(v1, axisVec);
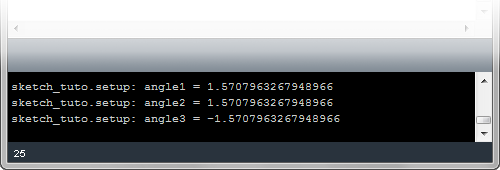
IG.p("angle1 = "+angle1);
IG.p("angle2 = "+angle2);
IG.p("angle3 = "+angle3);
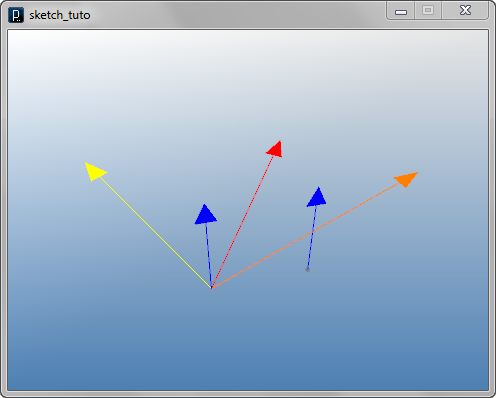
To rotate a vector, you use rot() method. There are two different types of arguments. In the first one, you put an axis vector in the first argument and angle in the second argument as a double value (the unit is in radian). The second type of the argument is that you put a center point of rotation as IVec in the first argument and the second is an axis vector and the third is rotation angle.
![]()
![]()
![]()
![]()
import processing.opengl.*; import igeo.*; size( 480, 360, IG.GL ); IVec v1 = new IVec(10, 10, 10); IVec axis = new IVec(0, 0, 10); IVec v2 = v1.dup(); v2.rot(axis, PI/2); IVec center = new IVec(10,0,0); IVec v3 = v1.dup(); v3.rot(center, axis, -PI/2); v1.show().clr(1.,0,0); axis.show().clr(0,0,1.); v2.show().clr(1.,1.,0); IPoint centerPt = new IPoint(center); axis.show(center).clr(0,0,1.); v3.show().clr(1.,.5,0);
Reflect Vectors
![]()
![]()
![]()
![]()
import processing.opengl.*; import igeo.*; size( 480, 360, IG.GL ); IVec v1 = new IVec(10,10,10); IVec planeNormal = new IVec(10,0,0); IVec v2 = v1.dup(); v2.ref(planeNormal); IVec planeCenter = new IVec(20,0,0); IVec v3 = v1.dup(); v3.ref(planeCenter, planeNormal); v1.show().clr(1.,0,0); planeNormal.show().clr(0,0,1.); v2.show().clr(1.,1.,0); new IPoint(planeCenter); planeNormal.show(planeCenter).clr(0,0,1.); v3.show().clr(1.,.5,0);
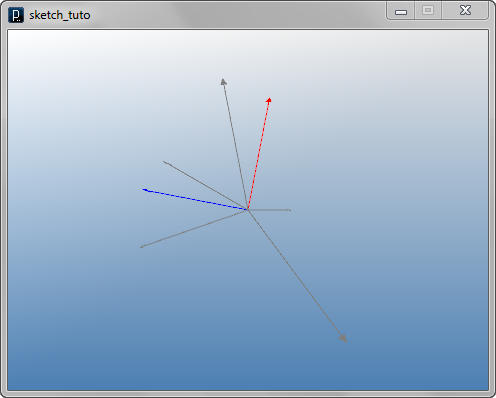
Compare Vectors![]()
![]()
![]()
![]()
import processing.opengl.*;
import igeo.*;
size( 480, 360, IG.GL );
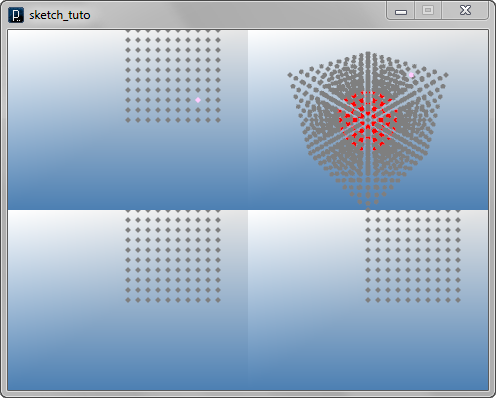
IVec v1 = new IVec(70, 20, 90);
IVec v2 = new IVec(50, 50, 40);
for(int i=0; i < 10; i++){
for(int j=0; j < 10; j++){
for(int k=0; k < 10; k++){
IVec v = new IVec(i*10, j*10, k*10);
if( v.eq(v1) ){
new IPoint(v).clr(1.,.8,1.);
}
else if( v.eq(v2, 30) ){
new IPoint(v).clr(1.,0,0);
}
else{
new IPoint(v);
}
}
}
}
Create Difference Vectors
IVec v3 = v2.dif(v1);
IVec v3 = v2.dup().sub(v1);
![]()
![]()
![]()
![]()
import processing.opengl.*; import igeo.*; size( 480, 360, IG.GL ); IVec v1 = new IVec(30,-20,-10); IVec v2 = new IVec(20,0,20); IVec v3 = v2.dif(v1); v1.show().clr(1.,0,0); v2.show().clr(0,0,1.); v3.show(v1).clr(1.,1.,0);
Create Midpoint/Bisector Vectors
IVec v3 = v1.mid(v2);
IVec v3 = v1.dup().add(v2).div(2);
IVec v4 = v1.bisect(v2);
IVec v4 = v1.dup().unit().add(v2.dup().unit());
![]()
![]()
![]()
![]()
import processing.opengl.*; import igeo.*; size( 480, 360, IG.GL ); IVec v1 = new IVec(10,0,0); IVec v2 = new IVec(10,10,10); IVec v3 = v1.mid(v2); IVec v4 = v1.bisect(v2); v1.show().clr(1.,0,0); v2.show().clr(0,0,1.); v3.show().clr(1.,1.,0); v4.show().clr(1.,.5,0).size(1); // making a head small
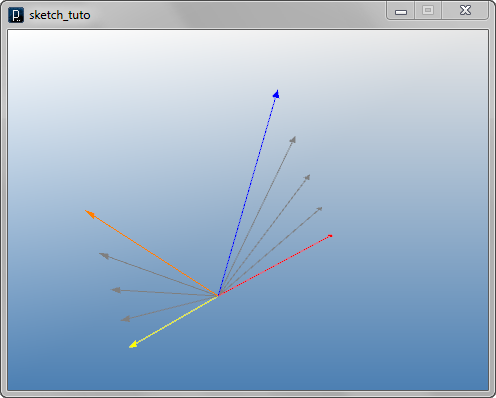
Create Summation Vectors![]()
![]()
![]()
![]()
import processing.opengl.*; import igeo.*; size( 480, 360, IG.GL ); IVec v1 = new IVec(20,0,-10); IVec v2 = new IVec(10,20,30); IVec total1 = v1.sum(v2); // sum of two vectors IVec v3 = new IVec(-20,30,-20); IVec v4 = new IVec(-30,-10,30); IVec v5 = new IVec(-10,-40,-10); IVec total2 = v1.sum(v2,v3,v4,v5); // sum of five vectors v1.show(); v2.show(); v3.show(); v4.show(); v5.show(); total1.show().clr(1.,0,0); total2.show().clr(0,0,1.);
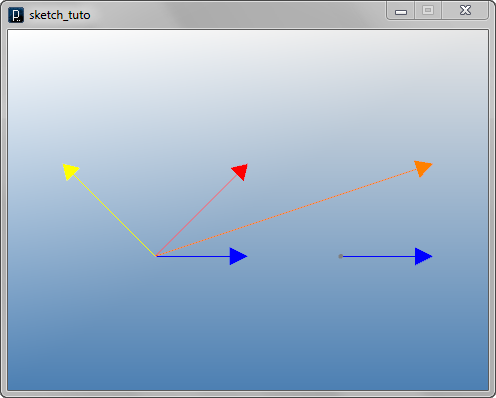
Create Weighted Summation Vectors
IVec v3 = v1.sum(v2, 0.2, 0.8);
IVec v3 = v1.dup().mul(0.2).add(v2.dup().mul(0.8));
IVec v4 = v1.sum(v2, 0.8);
IVec v4 = v1.dup().mul(1-0.8).add(v2.dup().mul(0.8));
![]()
![]()
![]()
![]()
import processing.opengl.*; import igeo.*; size( 480, 360, IG.GL ); IVec v1 = new IVec(50,0,-10); IVec v2 = new IVec(30,10,40); IVec u1 = v1.sum(v2, 0.75, 0.25); IVec u2 = v1.sum(v2, 0.5, 0.5); IVec u3 = v1.sum(v2, 0.25, 0.75); IVec v3 = new IVec(-20,10,-10); IVec v4 = new IVec(-20,10,30); IVec u4 = v3.sum(v4, 0.25); IVec u5 = v3.sum(v4, 0.5); IVec u6 = v3.sum(v4, 0.75); v1.show().clr(1.,0,0); v2.show().clr(0,0,1.); v3.show().clr(1.,1.,0); v4.show().clr(1.,.5,0); u1.show(); u2.show(); u3.show(); u4.show(); u5.show(); u6.show();
HOME
FOR PROCESSING
DOWNLOAD
DOCUMENTS
TUTORIALS (Java /
Python)
GALLERY
SOURCE CODE(GitHub)
PRIVACY POLICY
ABOUT/CONTACT
